Joseph Ramses Méndez Cam
Mechatronics Engineer
ERASMUS MSc. Embedded Intelligence Nanosystems Engineering

ERASMUS MSc. Embedded Intelligence Nanosystems Engineering















I am a Mechatronics Engineer currently pursuing an ERASMUS MSc. in Embedded Intelligence Nanosystems Engineering. I'm a recipient of the prestigious Erasmus Mundus Excellence Scholarship, studying across three European universities: Hellenic Mediterranean University (Greece), University of Siegen (Germany), and University of Orléans (France).
My work explores AI and Machine Learning, Robotics and Automation, Computer Vision, and UAV/Drone systems. I obtained my Bachelor's degree in Mechatronics Engineering from Pontificia Universidad Católica del Perú (PUCP). Previously, I conducted research at Yamagata University in Japan, focusing on image recognition using convolutional neural networks.
I have worked as an R&D Automation Engineer at RESEMIN S.A., Research Assistant in Robotics at PUCP, and Engineering Team Member at qAira Drones. My research has been published in IEEE, Elsevier, and Springer, focusing on robotics automation, drone technology for precision agriculture, and machine learning applications.
Languages: Spanish (Native), English (C2), Japanese (B2), French(A2), German (A2)
Research with industrial robot arms (UR, Fanuc, Kuka, ABB), Computer Vision for inspection, and Motion Planning algorithms.
Restored and modernized the classic Darwin-OP simulation for ROS Noetic. Patched compatibility issues to enable out-of-the-box dynamic walking and joint control on modern systems.
RoboDK simulation of a UR robotic arm on a mobile truck platform for automated explosive placement in mining operations, enhancing safety and precision.
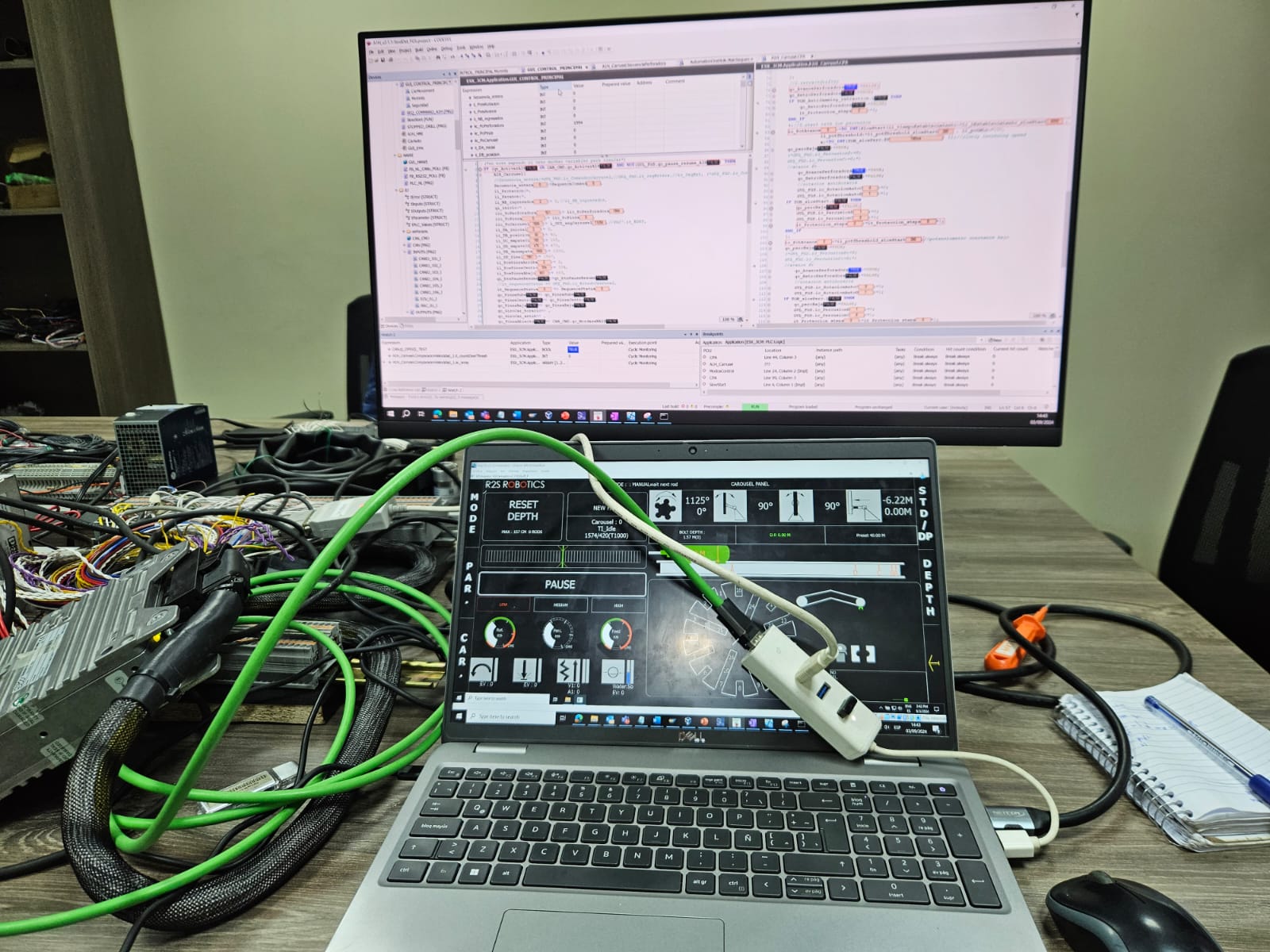
Heavy machinery automation with Siemens and Allen-Bradley PLCs, HMI development, and Motion Control systems.
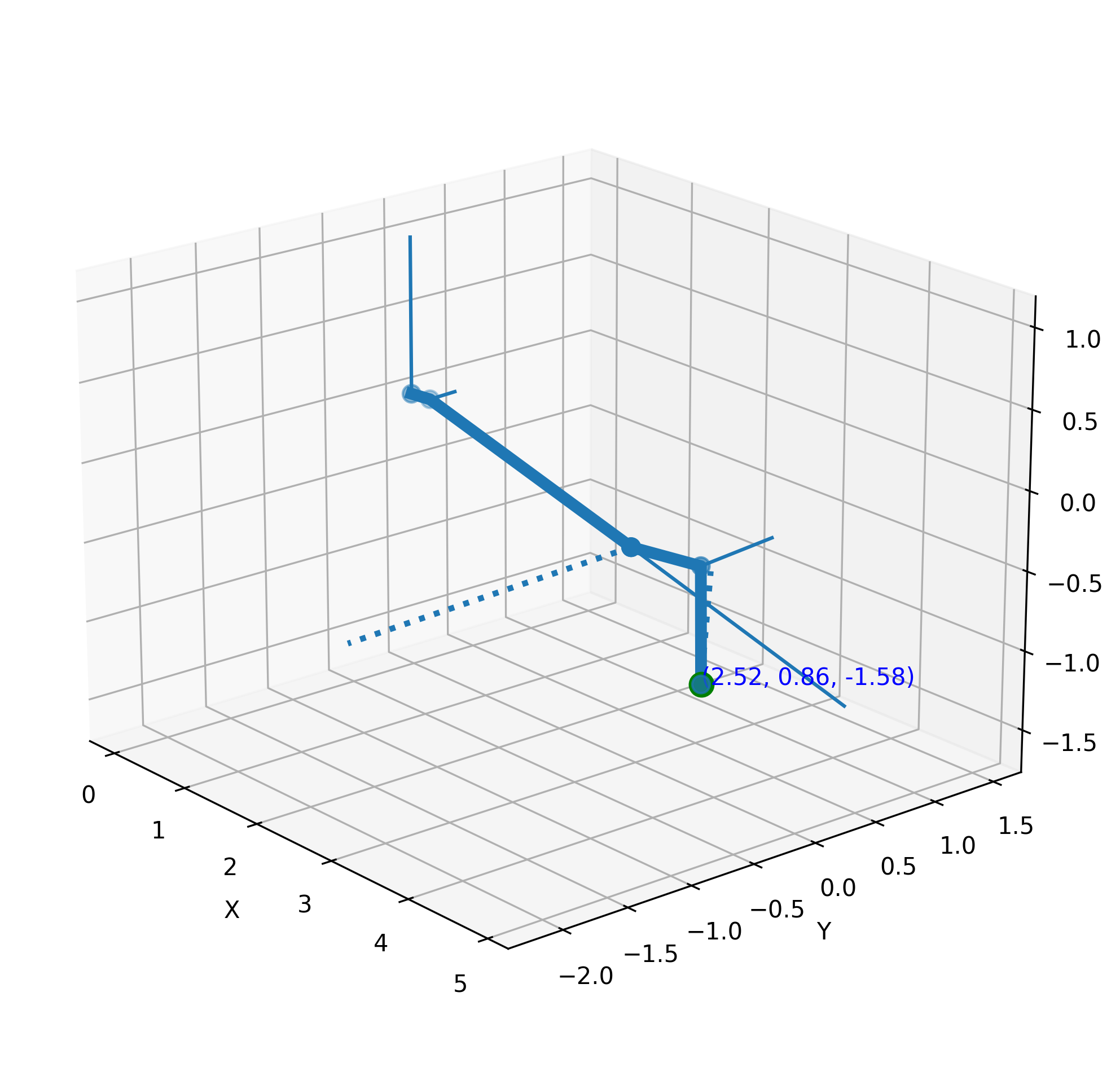
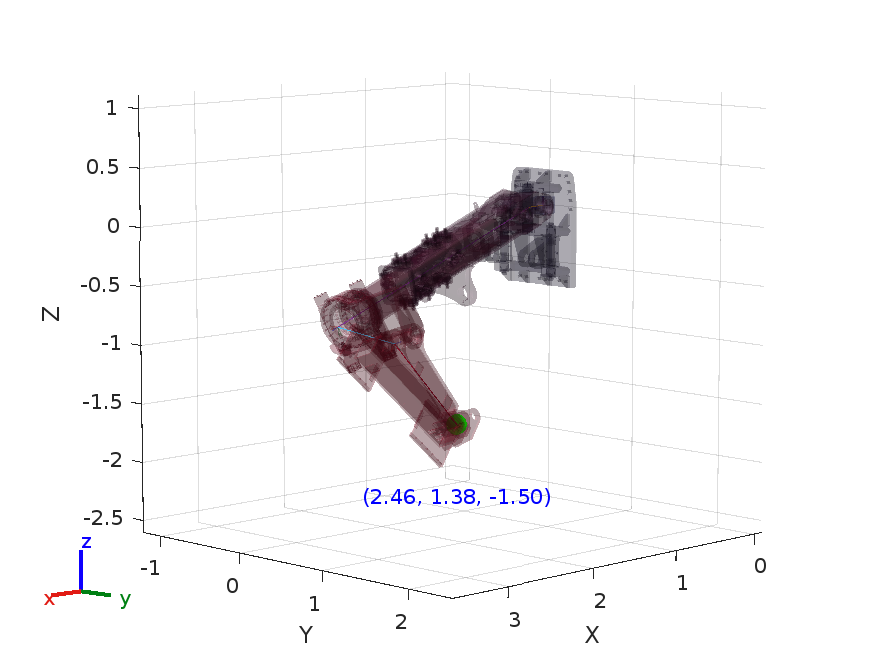
Docker-based robotics project for URDF model visualization and inverse kinematics calculation using ROS Noetic and Python libraries without MATLAB.
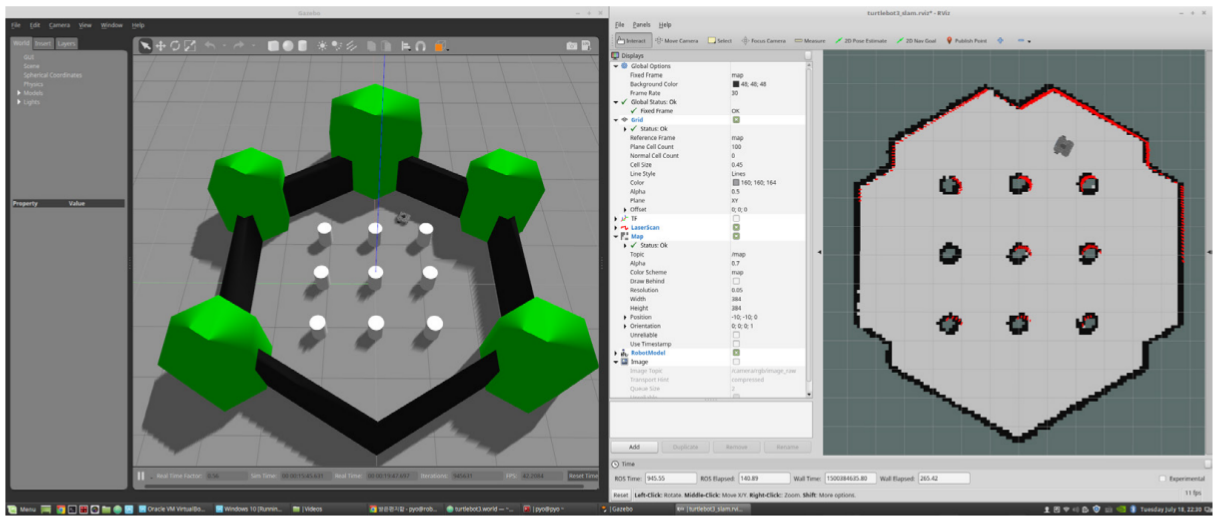
Implementation of Simultaneous Localization and Mapping algorithms for autonomous navigation systems.
Autonomous drone systems using PX4, MAVLink, and LiDAR point cloud processing for 3D reconstruction and path planning.
Deep Learning models for Object Detection and Semantic Segmentation, focusing on biological species classification.
Implemented CI/CD pipelines with Git and Jenkins, and RPA solutions with Power Automate for process optimization.
Research Highlights & Publications

Oct 2024 – Present · Europe
Dec 2022 – Oct 2024 · Peru
Mar 2022 – Nov 2022 · Lima, Peru
Mar 2022 – Jul 2022 · Lima, Peru
Aug 2019 – Dec 2020 · Yamagata, Japan
Mar 2017 – Jul 2022 · Lima, Peru
I'm always open to discussing new projects, research opportunities, or collaborations in robotics, AI, and automation.
📍 Currently in Orléans, France
📱 +33 749213311